(!)Due to Microsoft's end of support for Internet Explorer 11 on 15/06/2022, this site does not support the recommended environment.
68.800 Stock items for Same Day Shipping
68.800 Item Stok untuk Pengiriman di Hari yang Sama
Search by Category / Brand
Pencarian dengan
Kategori / Merek
Search by Category Pencarian dengan Kategori
- Automation Components
A wide variety of standard and configurable components for factory automation engineers in industries such as automotive, semiconductor, packaging, medical and many more.
- Linear Motion
- Rotary Motion
- Connecting Parts
- Rotary Power Transmission
- Motors
- Conveyors & Material Handling
- Locating, Positioning, Jigs & Fixtures
- Inspection
- Sensors, Switches
- Pneumatics, Hydraulics
- Vacuum Components
- Hydraulic Equipment
- Discharging / Painting Devices
- Pipe, Tubes, Hoses & Fittings
- Modules, Units
- Heaters, Temperature Control
- Framing & Support
- Casters, Leveling Mounts, Posts
- Doors, Cabinet Hardware
- Springs, Shock Absorbers
- Adjusting, Fastening, Magnets
- Antivibration, Soundproofing Materials, Safety Products
- Fasteners
A good selection of accessories such as screws, bolts, washers and nuts that you may need for your daily engineering usage.
- Materials
Browse industrial materials ranging from heat insulating plates, sponges, to metal and plastic materials in different sizes to meet your various applications.
- Wiring Components
A wide variety of wiring parts for connecting and protecting control and PC parts including Connectors, Cables, Electric Wires, Crimping Terminals and more.
- LAN Cables / Industrial Network Cables
- Cables by Application
- Cables with Connectors
- RS232 / Personal Computers / AV Cables
- Wires/Cables
- Connectors (General Purpose)
- Crimp Terminals
- Zip Ties
- Cable Glands
- Cable Bushings/Clips/Stickers
- Screws/Spacers
- Cable Accessories
- Tubes
- Protection Tubes
- Ducts/Wiremolds
- General Purpose Tools
- Dedicated Tools
- Soldering Supplies
- Electrical & Controls
A wide variety of controls and PC parts for electrical engineers including Controls, Powers, PC parts and more.
- Cutting Tools
A wide variety of cutting tools for many uses and work materials including End Mills, Drills, Cutters, Reamers, Turning Tools and more.
- Carbide End Mills
- HSS End Mills
- Milling Cutter Inserts/Holders
- Customized Straight Blade End Mills
- Dedicated Cutters
- Turning Tools
- Drill Bits
- Screw-Hole-Related Tools
- Reamers
- Chamfering / Centering Tools
- Fixtures Related to Cutting Tools
- Step Drills
- Hole Saws
- Clean Key Cutters
- Core Drills (Tip Tools)
- Magnetic Drilling Machine Cutters
- Drill Bits for Electric Drilling Machines
- Woodworking Drill Cutters
- Drills for Concrete
- Processing Tools
A wide variety of tools and supplies used in processing including Machine Tools, Measurement Tools, Grinding and Polishing Supplies and more.
- Material Handling & Storage
A wide variety of goods used in shipment, material handling and warehouse including Tape supplies, Stretch film, Truck, Shelf, Crane and more.
- Tape Supplies
- Cushioning Materials
- Stretch Films
- Cardboard
- Plastic Bags
- PP Bands
- Magic Tapes / Tying Belts
- Rubber Bands
- Strings/Ropes
- Cable Ties
- Tags
- Labelers
- Unpacking Cutters
- Packing Support Equipment
- Cloth Sheets for Packing
- Conveyance/Dolly Carts
- Tool Wagons
- Tool Cabinets / Container Racks
- Lifters / Hand Pallets
- Container Pallets
- Storage Supplies
- Shelves/Racks
- Work Benches
- Suspended Clamps/Suspended Belts
- Jack Winches
- Chain Block Cranes
- Bottles/Containers
- Bicycle Storage Area
- Safety & General Supplies
A large variety of goods for every kind of factories and offices including Protection items, Cleaning supplies, sanitations, office supplies and more.
- Lab & Clean Room Supplies
A large variety of items used in R&D and Clean Room including research Equipment, Laboratory Essentials, Analysis Supplies, Clean Environment-Related Equipment and more.
- Press Die Components
Choose from thousands of standard stamping die components including Punch & Die, Gas Springs, Guide Components, Coil Springs and many more.
- Plastic Mold Components
Browse our wide variety of mold components including Ejector Pins, Sleeves, Leader Components, Sprue Bushings and many more.
- Ejector Pins
- Sleeves, Center Pins
- Core Pins
- Sprue bushings, Gates, and other components
- Date Mark Inserts, Recycle Mark Inserts, Pins with Gas Vent
- Undercut, Plates
- Leader Components, Components for Ejector Space
- Mold Opening Controllers
- Cooling or Heating Components
- Accessories, Others
- Components of Large Mold, Die Casting
- Injection Molding Components
Browse our injection molding components including Heating Items, Couplers, Hoses and more.
- Injection Molding Machine Products
- Accessories of Equipment
- Auxiliary Equipment
- Air Nippers
- Air Cylinders
- Air Chuck for Runner
- Chuck Board Components
- Frames
- Suction Components
- Parallel Air Chuck
- Special Air Chuck
- Chemical for Injection Molding
- Mold Maintenance
- Heating Items
- Heat Insulation Sheets
- Couplers, Plugs, One-touch Joints
- Tubes, Hoses, Peripheral Components
- Komponen Mekanis
- Linear Motion
- Rotary Motion
- Connecting Parts
- Rotary Power Transmission
- Motors
- Conveyors & Material Handling
- Locating, Positioning, Jigs & Fixtures
- Inspection
- Sensors, Switches
- Pneumatics, Hydraulics
- Vacuum Components
- Hydraulic Equipment
- Discharging / Painting Devices
- Pipe, Tubes, Hoses & Fittings
- Modules, Units
- Heaters, Temperature Control
- Framing & Support
- Casters, Leveling Mounts, Posts
- Doors, Cabinet Hardware
- Springs, Shock Absorbers
- Adjusting, Fastening, Magnets
- Antivibration, Soundproofing Materials, Safety Products
- Sekrup, Baut, Washer, Nut
- Material
- Komponen Kabel
- LAN Cables / Industrial Network Cables
- Cables by Application
- Cables with Connectors
- RS232 / Personal Computers / AV Cables
- Wires/Cables
- Connectors (General Purpose)
- Crimp Terminals
- Zip Ties
- Cable Glands
- Cable Bushings/Clips/Stickers
- Screws/Spacers
- Cable Accessories
- Tubes
- Protection Tubes
- Ducts/Wiremolds
- General Purpose Tools
- Dedicated Tools
- Soldering Supplies
- Elektrikal & Kontrol
- Peralatan Pemotong
- Carbide End Mills
- HSS End Mills
- Milling Cutter Inserts/Holders
- Customized Straight Blade End Mills
- Dedicated Cutters
- Turning Tools
- Drill Bits
- Screw-Hole-Related Tools
- Reamers
- Chamfering / Centering Tools
- Fixtures Related to Cutting Tools
- Step Drills
- Hole Saws
- Clean Key Cutters
- Core Drills (Tip Tools)
- Magnetic Drilling Machine Cutters
- Drill Bits for Electric Drilling Machines
- Woodworking Drill Cutters
- Drills for Concrete
- Peralatan Produksi
- Penanganan Material & Penyimpanan
- Tape Supplies
- Cushioning Materials
- Stretch Films
- Cardboard
- Plastic Bags
- PP Bands
- Magic Tapes / Tying Belts
- Rubber Bands
- Strings/Ropes
- Cable Ties
- Tags
- Labelers
- Unpacking Cutters
- Packing Support Equipment
- Cloth Sheets for Packing
- Conveyance/Dolly Carts
- Tool Wagons
- Tool Cabinets / Container Racks
- Lifters / Hand Pallets
- Container Pallets
- Storage Supplies
- Shelves/Racks
- Work Benches
- Suspended Clamps/Suspended Belts
- Jack Winches
- Chain Block Cranes
- Bottles/Containers
- Bicycle Storage Area
- Perlengkapan Keamanan & Umum
- Perlengkapan Sanitasi & Lab
- Komponen Press Die
- Komponen Plastik Mold
- Ejector Pins
- Sleeves, Center Pins
- Core Pins
- Sprue bushings, Gates, and other components
- Date Mark Inserts, Recycle Mark Inserts, Pins with Gas Vent
- Undercut, Plates
- Leader Components, Components for Ejector Space
- Mold Opening Controllers
- Cooling or Heating Components
- Accessories, Others
- Components of Large Mold, Die Casting
- Komponen Injeksi Moulding
- Injection Molding Machine Products
- Accessories of Equipment
- Auxiliary Equipment
- Air Nippers
- Air Cylinders
- Air Chuck for Runner
- Chuck Board Components
- Frames
- Suction Components
- Parallel Air Chuck
- Special Air Chuck
- Chemical for Injection Molding
- Mold Maintenance
- Heating Items
- Heat Insulation Sheets
- Couplers, Plugs, One-touch Joints
- Tubes, Hoses, Peripheral Components
Search by Brand Pencarian dengan Merek


This translation is a Google translation Terjemahan ini adalah terjemahan Google
- Penghentian penjualan kategori produk pneumatik Seri Ekonomi (E-series). Info Detail
Notice of End of Sales for Economy Series Pneumatic Equipment Category. More information.
Hands, Grippers(Type:Related Components)


| Days to Ship |
|
|---|
-

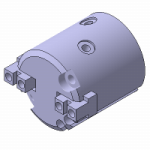
Parallel Type Air Gripper, 3-Finger type, Through Hole, MHSH3 Series
SMC
[Features]
· Lightweight and compact design with reduced height.
· High repeatability: ±0.01 mm.
· Can be equipped with an auto switch.
· Easy alignment when mounting the main body.
· Can be mounted from 2 directions.
· Utilizes wedge cam construction.
· Can be equipped with a small auto switch.Days to Ship: 15 Day(s) or more -

Gripper, Robot Peripheral Equipment Auto Hand Changer KHC Series
KONDO SEISAKUSHO
Automatically change multiple hands and tools. Standard equipped with fall prevention mechanism.
- CAD :
- 2D
Standard Price: 3,330,248 IDR- Days to Ship: 24 Day(s) or more -

Gripper, Robot Peripheral Equipment Auto Hand Changer KHA Series
KONDO SEISAKUSHO
[Features]
· Leave large robot ATC up to this series.
· All 8 sizes, 9 models and standard lineup of maximum portable mass 25 to 600 kg.
· New lineup of portable 230 kg/600 kg.
· Clean room specification standard.
· Standard equipped with fall prevention mechanism.
· Maximum of 18 airport (portable 300 kg).
· Standard equipped with check valve.
· Lineup added with ground electrode unit and power electrode unit.- CAD :
- 2D
Standard Price: 5,681,137 IDR- Days to Ship: 20 Day(s) or more -

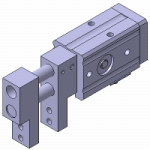
Air Gripper, Wedge Cam Operation, Slide Guide, 2-Finger Type, MHK2 Series
SMC
The wedge cam structure enables high-precision and high-rigidity.
Features a dust cover for improved load resistance and resistance to adverse environments.
[Features]
· Can be equipped with an auto switch.
· Includes a pinhole on the top surface for positioning.
· Features a built-in adjustment needle for adjusting the finger speed.
· High repeatability: ±0.01 mm.
· 2 types of finger material are available for use in different applications.
· 3 types of dust cover are available for use in different applications.
· Long stroke type now as standard.Days to Ship: 20 Day(s) or more -

Auto Hand Changing System (AHC), MA2 Series
SMC
Automatic replacement of robot hand tools and FMS of assembly line.
[Features]
·No adjustment or teaching required when changing tools
·Accelerates the start-up of the assembly lineDays to Ship: 20 Day(s) or more -

Auto Hand Changing System (AHC), MA3 Series
SMC
The AHC system changes robot hand tools automatically to accommodate workpieces of different shapes, thus making it possible to adopt FMS on the assembly line.
[Features]
· No adjustment or teaching required when changing tools.
· Accelerated launch of assembly lines.Days to Ship: 20 Day(s) or more -

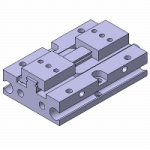
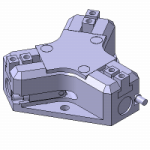
MACHINE ENGINEERING
Electric motor chuck controlled just like an electromagnetic valve, combining this product and an eco multi mechanism type.
[Features]
・ It can be used as an airless chuck by combining with the eco-multi mechanical type
・ In an environment without air. For applications where piping is long and response delay is a concern. For places where you are concerned about air leaks
・ It operates with open/close signal input. It is easy to use like a solenoid valve
・ Since it has a manual handle, centering work can be done easily even when the power is off- CAD :
- 2D
Standard Price: 4,974,864 IDR- Days to Ship: 14 Day(s) or more -
Bracket for MEPAC Unclamp Units
MACHINE ENGINEERING
[Features]This is a bracket for the MEPAC unclamp unit.
- CAD :
- 2D
Standard Price: 943,442 IDR- Days to Ship: 14 Day(s) or more -

Controller for MEPAC unclamp unit
MACHINE ENGINEERING
[Features]This is a controller for the MEPAC unclamp unit.
- CAD :
- 2D
Standard Price: 3,424,961 IDR Days to Ship: 14 Day(s) or more -

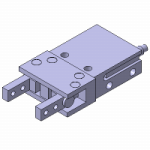
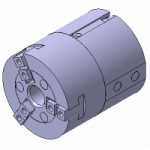
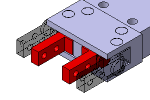
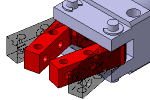
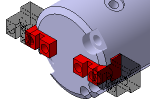
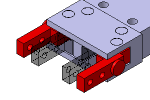
Gripper, Robot Peripheral Equipment, Quick Adjuster, QRA Series
KONDO SEISAKUSHO
Compact and compliance equipment.
[Features]
· Automatic aliment feature (smooth protruding binding for assembly, etc.).
· Holds the center (high precision return to the reference position and center holding with air lock function).
· Effective dust proof with rubber packing- CAD :
- 2D
Standard Price: 7,254,443 IDR- Days to Ship: 26 Day(s) or more -

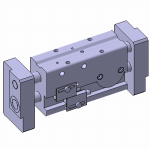
Robot peripheral equipment machine rotor ZRB series
KONDO SEISAKUSHO
[Features]
· Rack style super small rotation actuator.
· Rack style that cuts air leaks.
· 40% of size down compared to the vane style and saving space.
· "Stopper," "piping" and "sensor" on the same one surface.
· Run through hole mounting from 2 directions.
· Processed with pin hole for positioning with easy centering when mounting the body- CAD :
- 2D
Standard Price: 4,851,413 IDR Days to Ship: 26 Day(s) or more -

Gripper, Robot Peripheral Equipment Small Rotary Joint RJF/RJFS Series
KONDO SEISAKUSHO
[Features]
· Rotary joint for positioner, focused on small type.
· Small rotational resistance and low sliding resistance.
· High rigidity and low sliding with bearing built-in.
· Standardized with 2 different models of flow.
· New line up with 6/12/16 ports (RJF).
· New lineup with the type controls the height of 12/16 ports (RJFS).- CAD :
- 2D
Standard Price: 9,017,574 IDR- Days to Ship: 26 Day(s) or more -

Gripper, Open/Close Confirmation Sensor
KONDO SEISAKUSHO
Compact non-contact system.
[Features]
■ Contact method, 2 color display, resistant to cutting oil.
■ A lineup of supported sensors.- CAD :
- 2D
Standard Price: 1,341,602 IDR- Days to Ship: 8 Day(s) or more













| Brand |
|---|
| Product Series |
| CAD |
| Days to Ship |
| Number of Fingers |
| Main Body Shape |
| Gripping Methods |
| Operation Method |
| Open Dimension L1(mm) |
| Closed Dimension L2(mm) |
| Type |
| Gripping Force (when 0.5Mpa at closing)(N) |
| Gripping Force (when 0.5Mpa at opening)(N) |
| Maximum Gripping Force (Opening Side, Electric Type)(N) |
| Maximum Gripping Force (Closing Side, Electric Type)(N) |
| Environment, Applications |
| Additional Functions |
| Stroke Adjustment Mechanism |
|
|
|
|
|
|
|
|
|
|
|
|
| |
| Brand | SMC | KONDO SEISAKUSHO | KONDO SEISAKUSHO | SMC | SMC | SMC | MACHINE ENGINEERING | MACHINE ENGINEERING | MACHINE ENGINEERING | KONDO SEISAKUSHO | KONDO SEISAKUSHO | KONDO SEISAKUSHO | KONDO SEISAKUSHO |
| Product Series | Parallel Type Air Gripper, 3-Finger type, Through Hole, MHSH3 Series | Gripper, Robot Peripheral Equipment Auto Hand Changer KHC Series | Gripper, Robot Peripheral Equipment Auto Hand Changer KHA Series | Air Gripper, Wedge Cam Operation, Slide Guide, 2-Finger Type, MHK2 Series | Gripper, Robot Peripheral Equipment, Quick Adjuster, QRA Series | Gripper, Robot Peripheral Equipment Small Rotary Joint RJF/RJFS Series | |||||||
| CAD |
|
|
|
|
|
|
|
|
|
|
| ||
| Days to Ship | 15 Day(s) or more | 24 Day(s) or more | 20 Day(s) or more | 20 Day(s) or more | 20 Day(s) or more | 20 Day(s) or more | 14 Day(s) or more | 14 Day(s) or more | 14 Day(s) or more | 26 Day(s) or more | 26 Day(s) or more | 26 Day(s) or more | 8 Day(s) or more |
| Number of Fingers | - | - | - | - | 2 pcs. | 2 pcs. | - | - | - | - | - | - | - |
| Main Body Shape | - | - | - | - | Square Shape / Cylindrical Shape | Square Shape / Cylindrical Shape | - | - | - | - | - | - | - |
| Gripping Methods | - | - | - | - | Pinch, Parallel Type / Pinch, Chuck Type | Open, Parallel Type / Open, Chuck Type | - | - | - | - | - | - | - |
| Operation Method | - | - | - | - | Single Acting Type (Normally Open) | Single Acting Type (Normally Closed) | - | - | - | - | - | - | - |
| Open Dimension L1(mm) | - | - | - | - | 9.7 ~ 22 | 12.6 ~ 26.3 | - | - | - | - | - | - | - |
| Closed Dimension L2(mm) | - | - | - | - | 5.7 ~ 14.9 | 6.6 ~ 16.3 | - | - | - | - | - | - | - |
| Type | Related Components | Related Components | Related Components | Related Components | Related Components | Related Components | Related Components | Related Components | Related Components | Related Components | Related Components | Related Components | Related Components |
| Gripping Force (when 0.5Mpa at closing)(N) | - | - | - | - | 11 ~ 34 | - | - | - | - | - | - | - | - |
| Gripping Force (when 0.5Mpa at opening)(N) | - | - | - | - | - | 12 ~ 68 | - | - | - | - | - | - | - |
| Maximum Gripping Force (Opening Side, Electric Type)(N) | - | - | - | - | - | - | - | - | - | - | - | - | - |
| Maximum Gripping Force (Closing Side, Electric Type)(N) | - | - | - | - | - | - | - | - | - | - | - | - | - |
| Environment, Applications | - | - | - | - | Standard | Standard | - | - | - | - | - | - | - |
| Additional Functions | - | - | - | - | Not Provided | Not Provided | - | - | - | - | - | - | - |
| Stroke Adjustment Mechanism | - | - | - | - | Not Provided | Not Provided | - | - | - | - | - | - | - |













Loading...
Configure
Specification/Dimensions
-
Number of Fingers
- 2 pcs.
- 3 pcs.
- Others
-
Main Body Shape
-
Gripping Methods
-
Operation Method
- Double Acting Type
- Single Acting Type (Normally Open)
- Single Acting Type (Normally Closed)
-
Open Dimension L1(mm)
- 1
- 4
- 5
- 5.4
- 6
- 6.8
- 7.4
- 7.8
- 8
- 9.4
- 9.5
- 9.7
- 10
- 10.8
- 11
- 11.6
- 11.8
- 12
- 12.5
- 12.6
- 12.8
- 13
- 13.4
- 13.5
- 14
- 15
- 15.2
- 15.5
- 16
- 17
- 17.2
- 17.5
- 18.5
- 19
- 19.2
- 19.5
- 19.6
- 20
- 20.6
- 20.9
- 21
- 21.5
- 22
- 22.8
- 24
- 25
- 26
- 26.3
- 26.5
- 26.9
- 27
- 28
- 28.6
- 29
- 30
- 30.5
- 31
- 32
- 33
- 33.3
- 33.5
- 34
- 34.3
- 35
- 35.5
- 36
- 37
- 38
- 40
- 41
- 41.3
- 42
- 43
- 44
- 47.5
- 48
- 48.5
- 50
- 51
- 52
- 53.5
- 59
- 60
- 63.5
- 64
- 65
- 70
- 73
- 76
- 78
- 80
- 80.5
- 82
- 92
- 98
- 102
- 103
- 114
- 118
- 122
- 132
- 134
- 138
- 150
- 156
- 166
- 170
- 186
- 210
- 220
- 222
- 226
- 238
- 262
- 278
- 282
- 288
- 298
- 318
- 320
- 336
- 402
- 406
- 486
-
Closed Dimension L2(mm)
- 0
- 1
- 1.4
- 1.6
- 2
- 3
- 5
- 5.5
- 5.7
- 6.6
- 6.8
- 7
- 7.2
- 7.5
- 7.8
- 8
- 8.5
- 8.8
- 9
- 9.5
- 10
- 10.5
- 10.8
- 11
- 11.2
- 11.5
- 11.8
- 12
- 12.8
- 13
- 13.5
- 14
- 14.5
- 14.6
- 14.9
- 15
- 16
- 16.3
- 16.5
- 17.5
- 18
- 18.5
- 19
- 19.3
- 19.5
- 20
- 21
- 22
- 23
- 23.5
- 24
- 25
- 26
- 28
- 28.5
- 30
- 31
- 31.5
- 33
- 34
- 35
- 36
- 37
- 37.5
- 41
- 42
- 43
- 45.5
- 46
- 48
- 51
- 53.5
- 54
- 56
- 60.5
- 62
- 63
- 66
- 68
- 70
- 72
- 78
- 79
- 82
- 84
- 86
- 94
- 96
- 98
- 100
- 110
- 112
- 116
- 126
- 130
- 142
- 146
- 150
- 158
- 162
- 178
- 182
- 188
- 198
- 200
- 216
- 242
- 246
- 286
-
Type
- Main Body
- Related Components
- Main Body(Electric Type)
-
Gripping Force (when 0.5Mpa at closing)(N)
- 0.08
- 0.20
- 1,240
- 1,270
- 1.2
- 1.9
- 2
- 2.4
- 3,600
- 3.2
- 3.3
- 3.4
- 3.7
- 5.2
- 5.7
- 6,300
- 6.1
- 6.3
- 6.5
- 7
- 7.1
- 8
- 9
- 9.5
- 9.6
- 9.8
- 10
- 10,600
- 11
- 12
- 13
- 14
- 14.3
- 15
- 16
- 17
- 17.5
- 17.6XP
- 19
- 21
- 23
- 24
- 25
- 26
- 27
- 28
- 29.2
- 29.4
- 30
- 31
- 32
- 33
- 34
- 36
- 37
- 38
- 41
- 42
- 45
- 46
- 47
- 48
- 49
- 50
- 53
- 53.7
- 55
- 56
- 58
- 59
- 62
- 63
- 65
- 68
- 69
- 74
- 75
- 79
- 80
- 87
- 88
- 90
- 90XP
- 94.9
- 97
- 102
- 111
- 118
- 130
- 131
- 140
- 141
- 144
- 152XP
- 153.1
- 155
- 158
- 163
- 177
- 187
- 195
- 217
- 228
- 251
- 254
- 270
- 280
- 304XP
- 320
- 335
- 396
- 400
- 500
- 502
- 750
-
Gripping Force (when 0.5Mpa at opening)(N)
- 0.08
- 0.20
- 1,320
- 1.9
- 2
- 3.2
- 3.3
- 3.7
- 5.2
- 5.7
- 6.1
- 6.5
- 7
- 7.8
- 9.5
- 11
- 12
- 12.3
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 21
- 21.2
- 22
- 23
- 25
- 26
- 26.4
- 27
- 28
- 29.4XP
- 30
- 31
- 32
- 32.4
- 33
- 34
- 35
- 36
- 36.5
- 38
- 40
- 42
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 53
- 55
- 56
- 57
- 59
- 61
- 63
- 66
- 68
- 69
- 71
- 73
- 74
- 77
- 82
- 83
- 85
- 86
- 90
- 97
- 100
- 103
- 104
- 105
- 108
- 118
- 123
- 127
- 129XP
- 130
- 131
- 133
- 138
- 139
- 141
- 153
- 160
- 161
- 169
- 187
- 193
- 195
- 204
- 220
- 227
- 228
- 247
- 252XP
- 255
- 267
- 268
- 279
- 291
- 306
- 318
- 329
- 359
- 396
- 473XP
- 490
- 525
- 537
- 780
-
Maximum Gripping Force (Opening Side, Electric Type)(N)
-
Maximum Gripping Force (Closing Side, Electric Type)(N)
-
Environment, Applications
-
Additional Functions
-
Stroke Adjustment Mechanism

Narrow search by specifying Manufacturer
-
- MISUMI (0)
- KONDO SEISAKUSHO (6)
- SMC (4)
- MACHINE ENGINEERING (3)
- AIRTAC (0)
- CKD (0)
- FESTO (0)
- NKE (0)
- PISCO (0)
CAD
-
- 2D
- 3D
Related Categories to Hands, Grippers
-
Bank TransferTransfer Bank
MISUMI Contact
MISUMI Kontak
Copyright © MISUMI Corporation All Rights Reserved.
How can we improve?Bagaimana Kami bisa meningkatkan Pelayanan?
How can we improve?Bagaimana Kami bisa meningkatkan Pelayanan?
While we are not able to respond directly to comments submitted in this form, the information will be reviewed for future improvement.
Customer Privacy Policy Walaupun Kami tidak dapat langsung menjawab saran yang ditulis di lembar ini, informasinya akan kami review untuk peningkatan pelayanan dikemudian hari
Kebijakan Privacy
Thank you for your cooperation.Terima kasih atas kerjasama anda.
While we are not able to respond directly to comments submitted in this form, the information will be reviewed for future improvement.
Please use the inquiry form.
Customer Privacy Policy Walaupun Kami tidak dapat langsung menjawab saran yang ditulis di lembar ini, informasinya akan kami review untuk peningkatan pelayanan dikemudian hari
Silahkan pergunakan Forms Permintaan.
Kebijakan Privacy